
北工大图形学
更新: 1/20/2026 字数: 0 字 时长: 0 分钟
Introduction
图形学 (Computer Graphics) 是计算机科学的一个分支,主要研究如何使用计算机生成和处理图像。它涵盖了从基本的图形绘制到复杂的三维建模和渲染技术。
图形学严重依赖数学 (Graphics depends on mathematics),图形学常用的数学工具有:
- 几何学 (Geometry)
- 线性代数 (Linear Algebra)
- 微积分 (Calculus)
Linear Algebra
这部分基本都是比较基础的知识,有关线代的内容可以参考我 Games101 中的笔记,该笔记还介绍到了第8节课才会介绍的齐次坐标 (Homogeneous Coordinates) 的内容,也可以一并了解一下。
Games101/Lec_1.md#review-of-linear-algebra
老师的 pdf 里还提到了基 (Basis) 的概念,指的是一组向量,通过线性组合可以表示空间中的任意向量。正交规范基 (Orthonormal Basis) 是指一组互相垂直且长度为 1 的基向量,比如
这里再顺边标记一下一些常见数学名词的英文翻译:
- 向量 (Vector)
- 矩阵 (Matrix)
- 标量 (Scalar)
- 点积 (Dot Product)
- 叉积 (Cross Product)
- 行列式 (Determinant)
- 交换律 (Commutative Law)
- 结合律 (Associative Law)
- 分配律 (Distributive Law)
- 单位矩阵 (Identity Matrix)
- 逆矩阵 (Inverse Matrix)
- 转置矩阵 (Transpose Matrix)
可以通过代码来实现线代中的概念。使用 Point3f 类来表示三维空间中的点:
public class Point3f {
public float x, y, z;
public Point3f() {
this(0, 0, 0);
}
public Point3f(float x, float y, float z) {
this.x = x;
this.y = y;
this.z = z;
}
}data class Point3f(var x: Float = 0f, var y: Float = 0f, var z: Float = 0f)使用 Vector3f 类来表示三维空间中的向量:
public class Vector3f {
public float x, y, z;
public Vector3f() {
this(0, 0, 0);
}
public Vector3f(float x, float y, float z) {
this.x = x;
this.y = y;
this.z = z;
}
public float length() {
return (float) Math.sqrt(x * x + y * y + z * z);
}
public Vector3f normal() { }
public Vector3f dot(Vector3f v) { }
public Vector3f cross(Vector3f v) { }
}data class Vector3f(var x: Float = 0f, var y: Float = 0f, var z: Float = 0f) {
val length: Float
get() = sqrt(x * x + y * y + z * z).toFloat()
fun normal(): Vector3f { }
fun dot(v: Vector3f): Float { }
fun cross(v: Vector3f): Vector3f { }
}Rasterization
将上述数学概念转换为屏幕上的像素,这个过程就叫做光栅化 (Rasterization) 。
线
在讲画线和画三角形之前,我们必须先理解插值 (Interpolation)。插值简单来说就是在已知两个点的情况下,计算出这两个点之间的某个点的值。
线形插值 (Linear Interpolation) 是最简单的一种插值方式,就是根据两个端点的某个属性,按照比例关系计算出中间点的属性值:
INFO
ppt 里没提到,但在更简单的
接下来讲解一下如何绘制一条线,ppt 值谈到了三种方法:
| 算法 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| Explicit Form | 概念上简单 | 在斜率 | |
| Implicit Form | 适用性强 | 它画的是一条无限长的直线 (line),而不是线段 (segment) ,实际使用中我们用 x_min 和 x_max 来限制 | |
| Parametric Form | 易于编码 | ppt 中未提及 |
参数法 (Parametric Form) 是最优的,因为它不仅简单,而且完美地契合了插值。
ex:
for (i in 0..1000) {
val t = i / 1000.0
val point_r = point_p + (point_q - point_p) * t
setPixel(round(point_r.x), round(point_r.y))
}由于 Java 里不支持运算符重载等特性,必要时,我会使用 kotlin 来编写更贴合 ppt 中伪代码的示例。
填充三角形
现代图形学中万物皆为三角形,填充三角形是图形学中的基本操作。ppt 中提到了三种方法:
显式法 (Explicit Form / Raster Scan)
- 按
x坐标(列)循环。对于每一个x,计算出三角形在此处上边缘的yMax和下边缘的yMin。然后填充yMin到yMax之间的所有像素。 - 插值操作非常复杂:为了计算三角形一点的颜色,在遍历每一列时,你需要计算该列所在直线和三角形上下两条边的交点的颜色,然后根据交点的
y坐标进行插值;但要获得上下交点的颜色,又从上下交点各自所在边的端点进行插值。
- 按
隐式法 (Implicit Form / Half-Plane Test)
- 基于一个事实:一个点 P 如果在所有边的内侧,那它就在三角形内。在逆时针三角形中(A->B->C 逆时针排序),点在所有边的左侧即为在三角形内,顺时针同理点需在边右侧。
- 插值也很困难,难以做到颜色混合。
参数法 (Parametric Form / Barycentric)
- 三个权重
(alpha), (beta), (gamma) 来表示三角形内的任意一点 P。 是 P 相对于 A 点的权重——离 A 越近, 越接近 ;在 BC 边上, 为 。 和 同理。 - 重要性质:
时,点 P 在三角形内 - 当点在三角形内时,
可以直接用作插值的权重
- 插值公式,
可以代表颜色、法线等属性:
- 三个权重
同样,参数法是最推荐的:
for (x in xMin until xMax) {
for (y in yMin until yMax) {
val alpha = distance(Point(x, y), BC) / distance(A, BC)
val gamma = distance(Point(x, y), AB) / distance(C, AB)
val beta = 1.0 - alpha - gamma
if (alpha < 0.0 || beta < 0.0 || gamma < 0.0) {
continue
}
val finalColour = colour(A) * alpha +
colour(B) * beta +
colour(C) * gamma
setColour(finalColour)
setPixel(x, y)
}
}Geometric Modelling
描述世界
什么是建模? 它是对世界的描述 ,回答三个问题:
- 物体在哪里 (where)
- 是什么 (what)
- 如何表现 (how)
如何去描述一个复杂的图形,比如一棵树?我们可以将复杂物体分解 (break into) 为更小的、简单的图元 (primitives) ,比如点,线,球体 (spheres)、圆柱体 (cylinders)、多边形 (polygons) 等。
如此一来,一棵树可以表述为:棕色圆柱体 + 绿色球体
通过构造实体几何 (CSG - Constructive Solid Geometry),我们可以使用布尔运算 (Boolean Operations) 来组合简单图元,形成复杂物体,例如:
- 并集 (Union) :A ∪ B
- 差集 (Subtraction) :A - B
- 异或 (XOR) :A ⊕ B
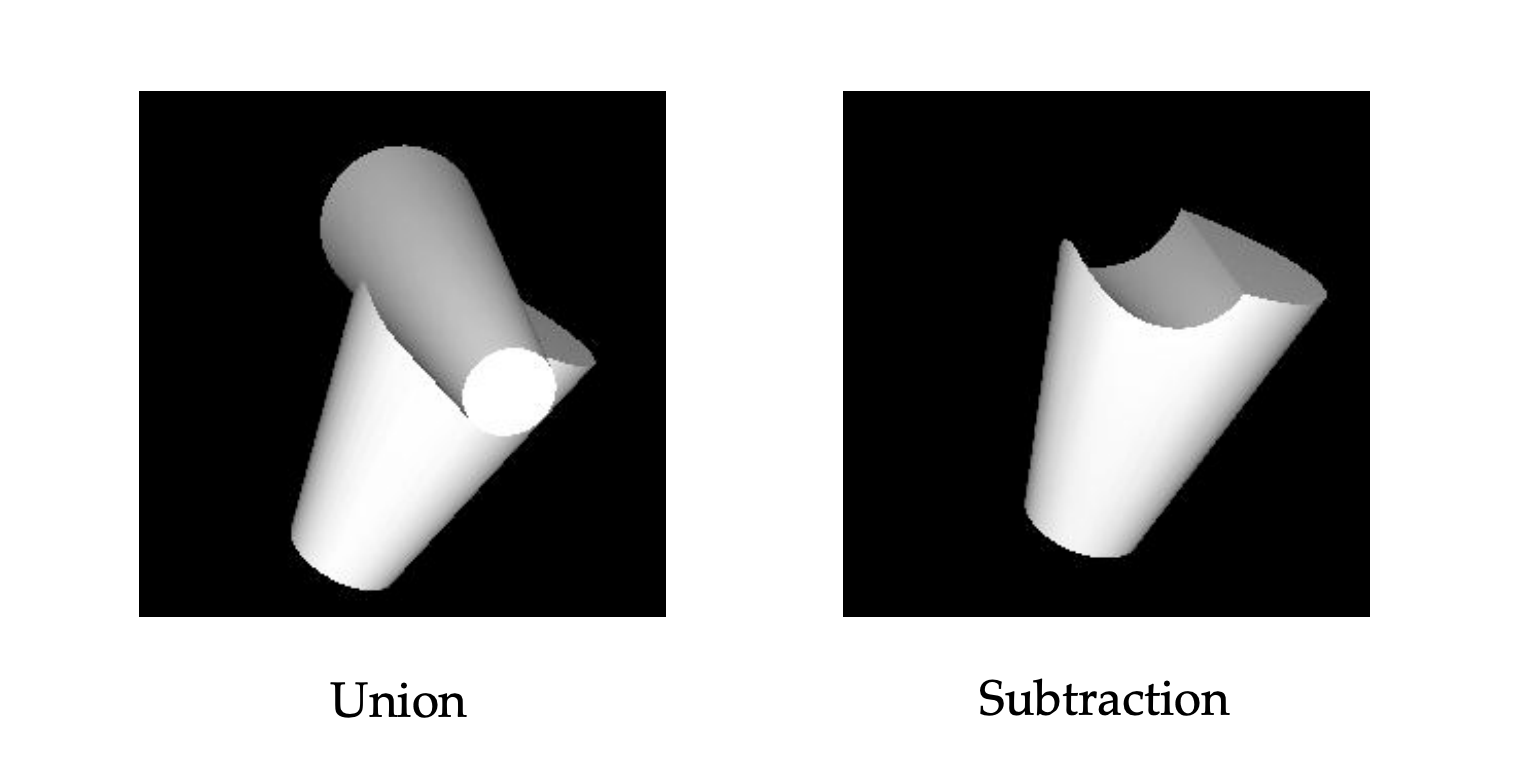
值得一提的是,OpenGL 不支持高级的CSG操作(如差集),它只是把所有东西都画出来(即并集)。
万物皆为三角形
这是现代图形学的核心原则。
我们已经知道如何绘制填充的三角形 ,一个关键点是:任何多边形都可以被分解(三角化)成一组三角形。只要我们会画三角形,就能绘制任何填充的 2D 多边形 (Polygons)。
3D 多面体 (Polyhedra) 是由多个面 (faces) 组成的,每一个面本质上就是一个 2D 多边形,所以只要我们会画三角形,我们就能绘制任何 3D 多面体。
描述一个长方体,需要定义8个顶点,12 个三角形:
val vertices: Array<IntArray> = arrayOf(
intArrayOf(-1, -1, -1), // 顶点 0
intArrayOf(-1, -1, 1), // 顶点 1
intArrayOf(-1, 1, -1), // 顶点 2
intArrayOf(-1, 1, 1), // 顶点 3
intArrayOf( 1, -1, -1), // 顶点 4
intArrayOf( 1, -1, 1), // 顶点 5
intArrayOf( 1, 1, -1), // 顶点 6
intArrayOf( 1, 1, 1) // 顶点 7
)
val triangles: Array<IntArray> = arrayOf(
intArrayOf(0, 1, 3),
intArrayOf(0, 2, 4),
intArrayOf(0, 1, 4),
intArrayOf(1, 5, 7),
intArrayOf(5, 4, 6),
intArrayOf(2, 3, 7),
intArrayOf(0, 3, 2),
intArrayOf(2, 6, 4),
intArrayOf(1, 4, 5),
intArrayOf(1, 7, 3),
intArrayOf(5, 6, 7),
intArrayOf(2, 7, 6)
)TIP
在指定这些三角形时,最好采用 CCW (逆时针) 顺序。
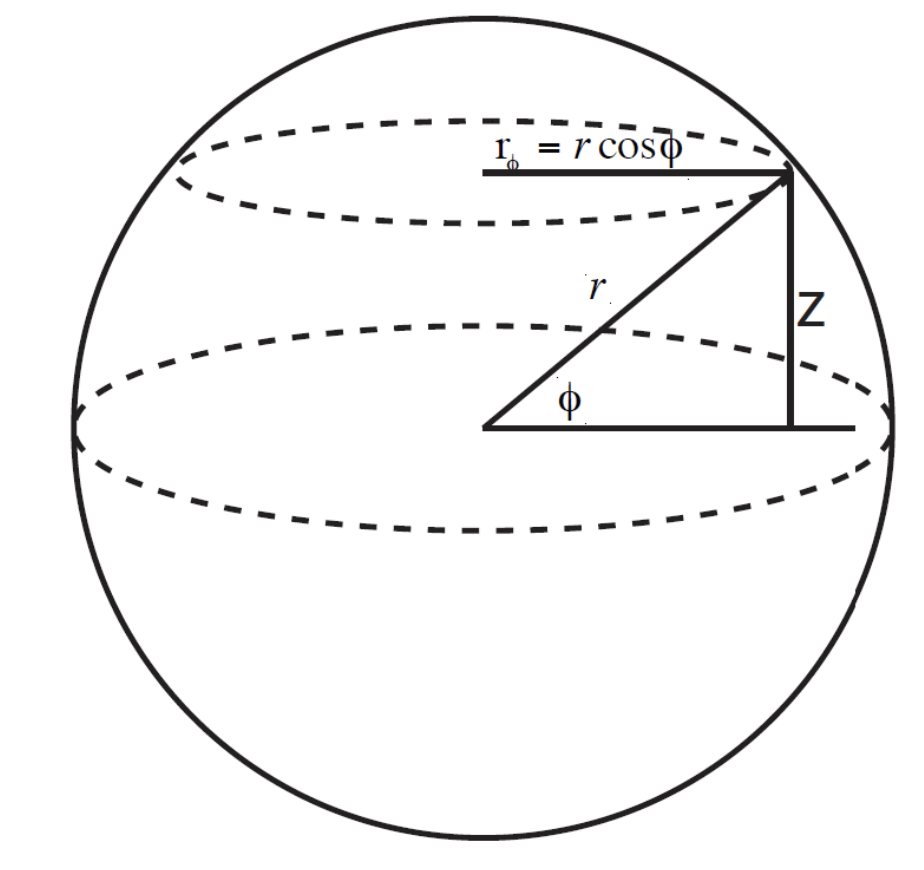
描述球形物体时,我们用面数非常多的多面体来近似圆形物体。
对于圆柱体,可以将其视为一个多边形的柱状体,底面和顶面是多边形,侧面是矩形。通过增加底面和顶面的边数,可以使圆柱体更接近真实的圆柱形状。
对于圆形,我们先讲解如何从球坐标 (
计算法线
为了让物体有明暗有质,你需要知道光线如何从表面反射 (reflecting light) 。法线 (Normal) 就是决定反射方向的向量。
对于一个
- 获取两个边的向量:
, - 计算法线:
- 可选但推荐—— 标准化 (Normalize) 法线:
代码形式:
fun normal(p: Point, q: Point, r: Point): Vector {
val u = q - p
val v = r - p
val n = u.cross(v)
val normalizedN = n / n.length
return normalizedN
}为每个三角面计算并使用一个法线,此过程平面着色 (Flat Shading),会使其看起来棱角分明。为了让近似的圆柱体/球体看起来平滑,我们不使用面法线,而是提供每个顶点 (per vertex) 的法线 。
圆柱体:在某个顶点的法线,就是从圆心指向该顶点的水平向量
。 球体:对于一个中心在
的球体,在表面任意一点 的法线就是向量 本身。
为什么点也能有法线?
你可能会疑惑,法线不是用来表示垂直于表面的方向吗,为什么点也能有法线?
这是因为,点法线 (Vertex Normal) 是专门为了服务于计算机图形学中的平滑着色 (Smooth Shading) 而“发明”出来的概念,在现实几何中没有意义,但在图形学中至关重要。
ppt 里没有介绍怎么利用法线,只是教了如何计算法线,以及它们可以做到什么。
Projective Rendering
投影渲染 vs 光线追踪
投影渲染 (Projective Rendering) 和光线追踪 (Ray Tracing) 是两种不同的图形渲染技术。
- 投影渲染:以物体为中心。为每个三角形,计算它在屏幕上的投影。
- 光线追踪:像素为中心。从每个像素出发,追踪光线与场景中物体的交点。更加复杂且消耗性能,但是能实现更逼真的光影效果。
遮挡
如果我们把所有三角形都投影到屏幕上,它们会产生遮挡 (Occlusion) 问题。需要一种手段,正确绘制三角形的前后关系。
画家算法 (Painter's Algorithm) 是一种简单的遮挡解决方案。它的核心思想是:从后往前绘制所有物体。但是该算法无法无法处理循环遮挡(ex:A 挡住 B,B 挡住 C,C 又挡住了 A)。
这是现代图形学的通常采用 Z-Buffering (深度缓冲) 作为解决方案,其核心在于:
- 开辟一块额外的内存 (Z-Buffer),它与屏幕像素一一对应,但它存储的不是颜色,而是深度值 (z coordinate)。
- 当你要在
处绘制一个新像素时,先计算它的深度 new_z。 - 检查 Z-Buffer 中
位置的旧深度 old_z,只在new_z比old_z更靠近相机时,才绘制这个新像素,并更新Z-Buffer中的值为new_z。
变换
变换参考 Games101 中内容,对于旋转部分你只要记住绕 X 轴、Y 轴、Z 轴的旋转矩阵即可:
我们此处重点讲解一下法线变换 (Normal Transformation) ——当物体经过变换 (Transformation) 后,法线也需要相应地变换,以确保光照计算的正确性。
我们依次考虑这四种情况:
- 平移
- 旋转
- 缩放
- 切变
对于平移,法线不变,因为平移不会改变表面的方向,这是很直观的;对于旋转和均匀缩放,法线可以直接使用相同的变换矩阵进行变换,因为旋转和均匀缩放不会改变表面的方向关系。
对于非均匀缩放,法线需要使用逆转置矩阵 (Inverse Transpose Matrix)。原因是,缩放会改变表面的方向,如果直接用缩放矩阵变换法线,会导致法线不再垂直于表面。使用逆转置矩阵可以确保法线在变换后仍然垂直于表面。
除了上述方法,你还可以在在缩放/切变之后,再重新计算法线,对于程序来说这其实是一种挺常见的做法。或者干脆避免使用缩放和切变也行。
Perspective Projection
文艺复兴时期的艺术家发现,现实世界中平行的线(如街道),在画面上并不是平行的 ,它们最后会它们汇聚在一个消失点 (Vanishing Point) 。
Orthographic Projection 平行投影
平行投影是一种简单的投影方式,它保持物体的比例和形状,但不考虑深度信息。所有的投影线都是平行的,因此不会产生消失点,也不存在近大远小。
那么,我们如何模拟近大远小的效果?我们通过相似三角形来做到这一点。
假设场景:
- 你的眼睛在原点
。 - 成像平面(ppt 里称作 Image Plane)在
处。 - 空间中有一个点
。
我们的目标是:计算 P 在成像平面上的投影点
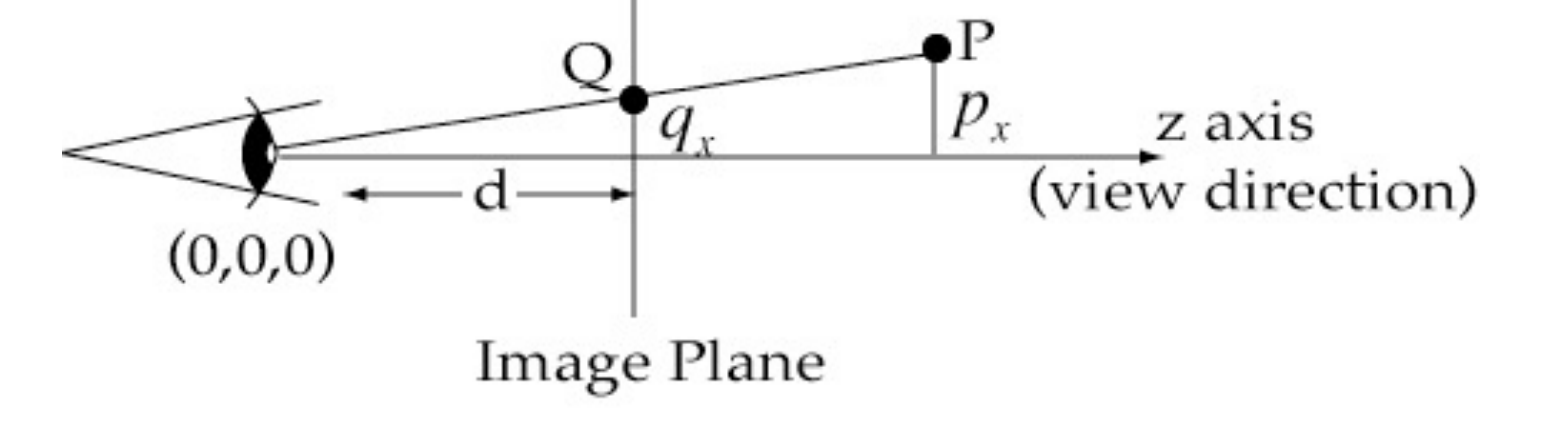
根据相似三角形的原理
可以得到结论:
Details
老师的 ppt 里没有介绍这一点,但我觉得说清楚有助于理解。
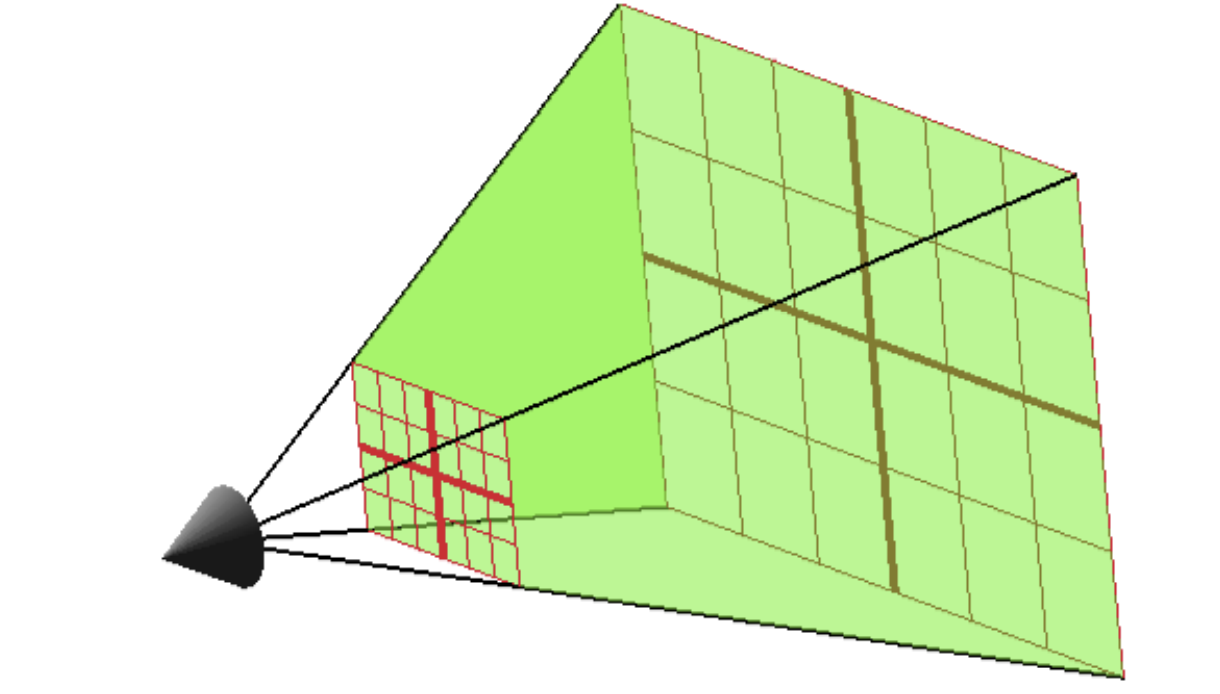
在现实世界中,光线穿过你眼睛的晶状体,晶状体(就像相机镜头)会把来自3D世界的、发散的光线聚焦,并清晰地成像在眼球后方的2D视网膜上。这个图像是倒立的,我们的大脑会再把它正过来。在图形学中,我们在眼前定义平面,这是为了方便计算,此外这个平面有个专门的名字——近平面 (Near Plane)。
人眼视野有限,于是我们也必须忽略太近或太远的物体。在透视投影中,我们能看到的空间是一个被切掉了顶部和底部的金字塔,该图形称为视锥体 (View Frustum) 。
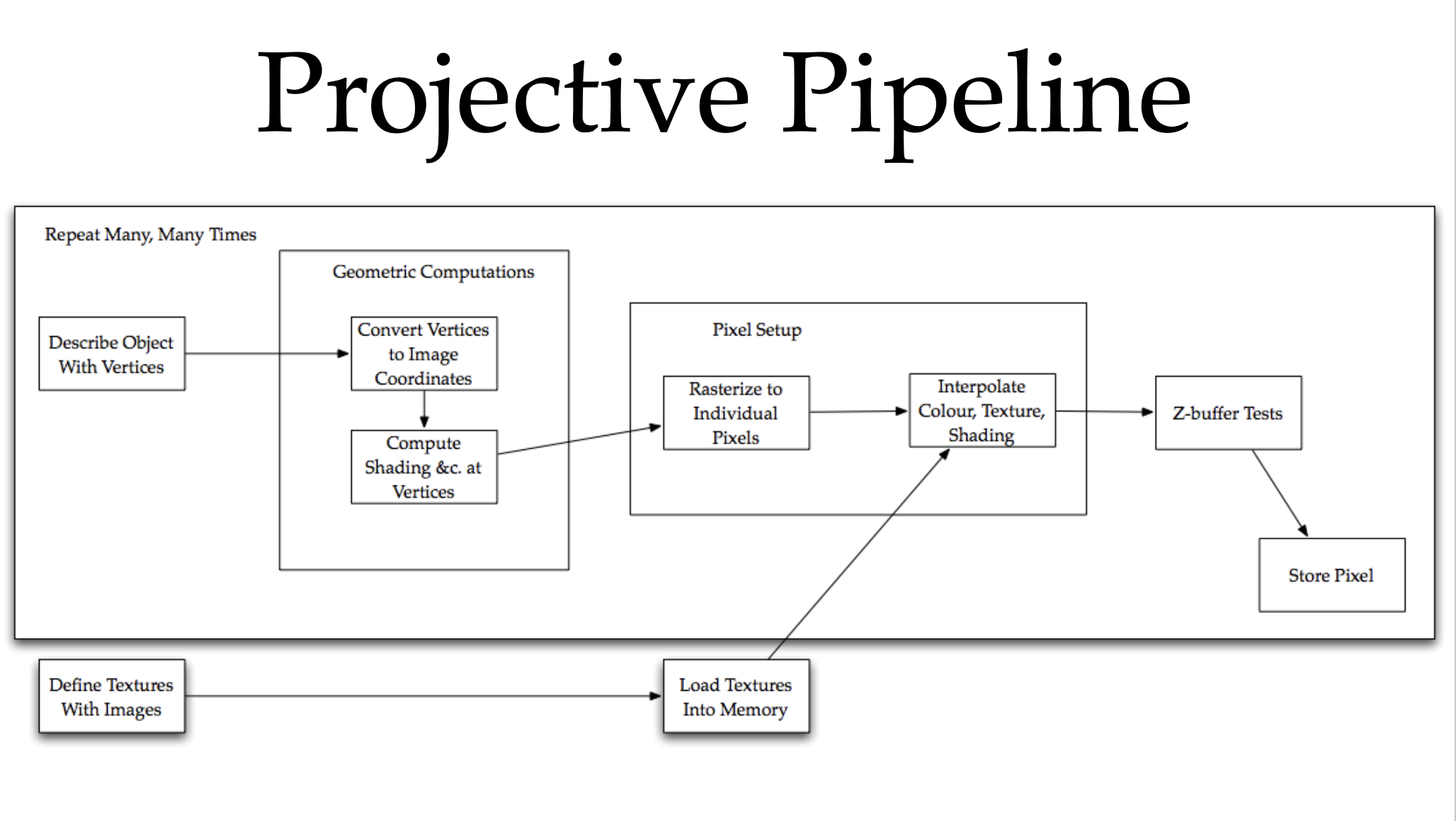
Projective Pipeline
一个顶点从被建模出来到显示在屏幕上,会依次经过6个坐标系:
- OCS (Object Coordinate System) - 物体坐标系
- WCS (World Coordinate System) - 世界坐标系
- VCS (View Coordinate System) - 视图坐标系
- CCS (Clipping Coordinate System) - 裁剪坐标系
- NDCS (Normalized Device Coordinate System) - 归一化设备坐标系
- DCS (Device Coordinate System) - 设备坐标系
我们来一个一个看:
Model Matrix:OCS (物体坐标系)
起点:OCS 指的是物体本身的坐标系,原点在物体的中心。
终点:WCS 是一个全局坐标系,原点在场景的中心。
变换矩阵:Model Matrix,将物体从它的本地坐标系变换到世界坐标系。它通过平移、旋转和缩放,把物体放到场景中(OCS
WCS)。
View Matrix:WCS (世界坐标系)
起点:你的所有物体(树、房子)现在都已摆放在世界坐标系中。你的摄像机也在这个世界中,比如它在
的位置。 终点 (VCS): 为了方便计算,我们不希望摄像机到处乱跑。我们希望摄像机永远固定在
点,并且永远朝向 轴的负方向。 变换矩阵:View Matrix,它移动和旋转整个世界,使摄像机刚好落在
并看向 。你的摄像机不会动,而是整个世界在动。 TIP
摄像机看相的方向其实也是自身局部坐标系的
方向。
Projection Matrix:VCS (视图坐标系)
- 起点 (VCS): 现在,所有物体都在摄像机坐标系中。
- 终点 (CCS): 这是一个“扭曲”了的坐标系,也叫裁剪空间 (Clipping Space)。
- 变换矩阵:Projection Matrix 很复杂,它定义了摄像机的镜头属性,并将 Frustum 扭曲成一个立方体,以便后续处理。
- 定义 View Frustum:根据你设置的 FOV (视野)、近平面 (
) 和远平面 ( ),定义了一个金字塔形的可见空间。 - 应用透视数学: 它使用下方那个复杂的矩阵 ,把 Frustum 扭曲成一个规整的立方体。
- 准备透视除法: 在乘上下方的变换矩阵后,坐标
会变成 ,即 分量携带了深度信息( ),为后续的透视除法做准备。
- 定义 View Frustum:根据你设置的 FOV (视野)、近平面 (
Perspective Division: CCS (裁剪坐标系)
- 起点 (VCS): 顶点还是齐次坐标
。 分量里携带着投影矩阵塞给它的深度信息。 - 终点 (CCS):顶点变成了普通的3D笛卡尔坐标。
- 作用:通过这一步实现近大远小的效果。我们通过除以
分量,来实现透视投影的“除以 ”效应:
Viewport Transformation: NDCS (归一化设备坐标系)
起点 (NDCS):经过先前的步骤,所有可见的坐标最后都会被压缩到一个与屏幕大小无关的、标准的立方体(如
到 )中。 终点 (DCS): 将所有顶点从标准立方体映射到实际的屏幕像素坐标系里。
作用:把那个归一化的坐标拉伸,以匹配你实际的窗口大小。比如将
映射到屏幕的左下角 ,将 映射到屏幕的右上角 。 TIP
这一步是渲染和操作系统 (O/S) 窗口的桥梁 。当你的窗口被重设大小 (resized) 时,只有这个变换需要被更新 。
Projective Pipeline 总结图
OpenGL 的投影渲染管线
OpenGL 是一个强大的图形库,我们来学习使用它。
基本绘图命令
glBegin(mode):在发送顶点数据之前,指定mode来告诉 GPU 如何理解这些顶点数据。常见的mode有:GL_POINTS:每个顶点都是一个独立的点。GL_LINES:你发的每两个顶点,都会被连接成一条线段。GL_TRIANGLES:你发的每三个顶点,都组合成一个三角形。
glEnd(): 标记顶点数据的结束。
在 glBegin 和 glEnd 之间,你不仅要发顶点的位置,还要发它的属性(法线、颜色等)。OpenGL 本身是一个状态机 (State Machine),这意味着你设置的一个属性(比如“当前颜色设为红色”)会一直保持(hangs around),直到你再次更改它。
// 开始绘制三角形
glBegin(GL_TRIANGLES);
// 设置颜色为红色
glColor3f(1.0, 0.0, 0.0);
glVertex3f(x1, y1, z1);
glVertex3f(x2, y2, z2);
// 设置颜色为绿色
glColor3f(0.0, 1.0, 0.0);
glVertex3f(x3, y3, z3);
// 结束绘制
glEnd();OpenGL 要求你先设置好一个顶点的所有属性,最后才用 glVertex() 来提交这个顶点。调用顺讯:
glNormal(...):设置当前的法线状态。glColor(...):设置当前的颜色状态。glTexCoord(...):设置当前的纹理坐标状态。glVertex(...):(最后一步) 设置位置坐标,并且把刚才设置的‘当前’法线、颜色、纹理全都打包给这个顶点。
// --- 绘制顶部(绿色)三角形的第一个顶点 ---
glNormal3f(x1, y1, 0.0); // 1. 设置法线
glVertex3f(x1, y1, 0.0); // 2. 提交顶点 (这个点打包了上面的法线)
// --- 绘制顶部(绿色)三角形的第二个顶点 ---
glNormal3f(x2, y2, 0.0); // 1. 设置新的法线
glVertex3f(x2, y2, 1.0); // 2. 提交顶点 (这个点打包了新的法线)
// --- 绘制顶部(绿色)三角形的第三个顶点 ---
glNormal3f(x1, y1, 0.0); // 1. 再次设置法线
glVertex3f(x1, y1, 1.0); // 2. 提交顶点 (这个点打包了这条法线)平滑着色 (Smooth Shading):当你设置
glShadeModel(GL_SMOOTH),GPU 会拿走这三个顶点的属性(比如一个红、一个绿、一个蓝),然后在光栅化时,使用重心坐标在三角形内部进行插值 (interpolate)。平面着色 (Flat Shading):当你设置
glShadeModel(GL_FLAT),GPU 会简单地只用第一个顶点的属性来填充整个三角形。
矩阵、变换与摄像机
OpenGL 做了一个简化:它只提供了两个主要的矩阵栈 :
GL_PROJECTION(投影矩阵):- 用途: 专门用来存放 Projection 矩阵。
- 对应管线: VCS
CCS
GL_MODELVIEW(模型视图矩阵):- 用途: 这是一个合并的矩阵。它同时存放 Model 矩阵 和 View 矩阵。
- 对应管线: OCS
WCS VCS
因为只有两个矩阵栈,你必须明确告诉 OpenGL 你接下来要操作的是哪一个 :
glMatrixMode(GL_PROJECTION); // 选择投影矩阵栈
// ...
glMatrixMode(GL_MODELVIEW); // 选择模型视图矩阵栈
// ...在设置摄像机时,你需要先设置 View 矩阵,然后再设置 Model 矩阵。你不需要自己计算。使用辅助库 GLU:
// eye:你的摄像机在世界中的位置
// center:你的摄像机正在看向的目标点
// up:摄像机的头顶朝向哪个方向(通常是 (0, 1, 0))
GLU.gluLookAt(eyex, eyey, eyez, centerx, centery, centerz, upx, upy, upz);设置镜头:
// 切换模式
glMatrixMode(GL_PROJECTION);
// 重置矩阵
glLoadIdentity();
// 选择你的“镜头”:
// 透视投影 (Perspective):
// fovy:Y轴的视野角度(Field of View),单位是度 。
// aspect:宽高比(width/height),用来防止图像被拉伸 。
// zNear / zFar:近/远裁剪平面。
gluPerspective(fovy, aspect, zNear, zFar);
// 非对称视锥体:glFrustum(left, right, bottom, top, zNear, zFar);
// 正交投影 (Orthographic):
glOrtho(left, right, bottom, top, zNear, zFar);操作物体 (Model Matrix):
// 切换模式
glMatrixMode(GL_MODELVIEW);
// 重置矩阵
glLoadIdentity();
// 设置摄像机
gluLookAt(...);
// 现在开始操作物体
// 这些函数会把新的变换矩阵乘到当前矩阵上(glMultMatrix)。
// 因为是“后乘”,所以执行顺序是反的。
glTranslate(...);
glScale(...);
glRotate(angle, x, y, z);管线的最后一步——设置视口:
// 设置视口 (Viewport)
glViewport(0, 0, windowWidth, windowHeight);设置光照与着色
打开光照,你可以设置多个光源:
glEnable(GL_LIGHTING); // 启用光照计算
glEnable(GL_LIGHT0); // 启用第0号光源配置光照属性:
// 设置光源位置
float[] lightPos = {x, y, z, w}; // w=1.0 表示点光源,w=0.0 表示方向光
glLightfv(GL_LIGHT0, GL_POSITION, lightPos, 0);
// 设置光源颜色
float[] lightColor = {r, g, b, a};
glLightfv(GL_LIGHT0, GL_DIFFUSE, lightColor, 0);
// 设置环境光颜色
float[] ambientColor = {r, g, b, a};
glLightfv(GL_LIGHT0, GL_AMBIENT, ambientColor, 0);
// 设置镜面反射颜色
float[] specularColor = {r, g, b, a};
glLightfv(GL_LIGHT0, GL_SPECULAR, specularColor, 0);当开启光照后,getColor() 函数将不再生效,取而代之的是材质函数 glMaterial():
float[] matDiffuse = {r, g, b, a};
glMaterialfv(GL_FRONT, GL_DIFFUSE, matDiffuse, 0);一个完整的流程
// 只需设置一次
void Start() {
// 设置镜头
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(fovy, aspect, zNear, zFar); // 透视投影
// 设置视口
glViewport(0, 0, windowWidth, windowHeight);
}
// 每一帧都要设置
void Update() {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); // 清屏
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
// 设置摄像机
gluLookAt(
0.0f, 0.0f, 5.0f, // eye position
0.0f, 0.0f, 0.0f, // look at point
0.0f, 1.0f, 0.0f // up vector
);
// 绘制物体
glBegin(GL_TRIANGLES);
// 设置顶点属性并提交顶点
glNormal3f(...);
glColor3f(...);
glVertex3f(...);
glEnd();
}Texture
纹理就是一张“画” ,被“贴”在一个3D模型的表面上。如果说之前的内容是在定义物体的几何形状,那么纹理就是在定义物体的外观细节。
组成纹理图像的像素被称为 Texel (纹理像素) 。要将一张贴图贴在3D模型上,我们需要一种映射关系,将材质上的每个 Texel 对应到模型表面的一个点。为了方便地描述这种关系,我们为 3D 模型表面定义一个2D坐标系,用
我们从一个把世界地图贴在球体上的例子开始:
我们有一个在球面上的3D顶点
在 OpenGL 里,纹理坐标
在 OpenGL 里,提供了 glTexCoord2f(s, t) 函数来设置当前顶点的纹理坐标。你需要在 glVertex() 之前调用它:
for (theta in 0 until numTheta) {
for (phi in 0 until numPhi) {
// 1. 计算顶点位置
val x = r * cos(phi) * cos(theta)
val y = r * cos(phi) * sin(theta)
val z = r * sin(phi)
// 我们在这里“预先”把 (phi, theta) 转换成 (s, t)
val s = (phi + Math.PI / 2) / Math.PI
val t = (theta + Math.PI) / (2 * Math.PI)
// 3. 把预计算好的 (s, t) 发送给GPU
glTexCoord2f(s, t)
glVertex3f(x, y, z)
}
}- Clamping (钳位):将超出范围的坐标限制在
内,大于 的部分设为 ,小于 的部分设为 。 - Repeating (重复):将坐标对
取模,使其在 范围内循环,如此可以实现平铺效果。
// Clamping
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
// Repeating
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);- Nearest Neighbour:将
四舍五入到最近的 texel。放大观察时可能产生马赛克。 - Bilinear Interpolation (双线性插值):同时读取周围4个 texel,然后根据距离远近做加权平均。这是一个两步插值——先在
方向(水平)做两次插值,再在 方向(垂直)对刚才的结果做一次插值。图像更平滑,但会模糊边缘。
// Nearest Neighbour
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
// Bilinear Interpolation
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);如何使用纹理颜色?
- Replace (替换): 完全忽略光照计算。物体是“自发光”的。无论有没有灯光,地球仪都是亮的。
- Modulate (调制): 把纹理颜色和光照计算结果(
dot(N, L))相乘。纹理会受到光照的影响。
// Replace
glTexEnvf(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_REPLACE);
// Modulate
glTexEnvf(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_MODULATE);纹理矩阵
通过纹理矩阵 (Texture Matrix),你可以对纹理坐标进行变换(平移、旋转、缩放),从而实现动态纹理效果,而不需要修改顶点数据本身。